A Leader-Follower Control Strategy Built and Refined using Relational Maneuver Primitives for Approximating Optimal Trajectories in Real-Time
Abstract
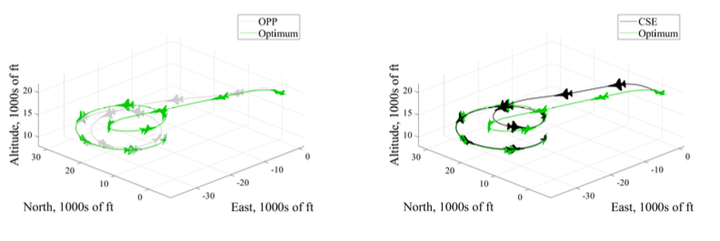
The work herein presents a new approach to aircraft control within a leader-follower formation, and the refinement process used in its development. During autonomous flight, a follower aircraft is tasked to rejoin and maintain a designated formation position, which is defined dynamically in reference to a maneuvering leader aircraft. Simple control algorithms, named Relational Maneuver Primitives, are intelligently combined into a control strategy such that the autonomous follower aircraft’s response approximates the optimal trajectory. This research specifically addresses the control strategy refinement process where a genetic algorithm is implemented to determine the appropriate selection of Relational Maneuver Primitives based on the Time-To-Go between the follower aircraft and the desired goal position. The control strategy takes the form of a lookup table database based on the current state of the follower aircraft which provides the autopilot with the appropriate Relational Maneuver Primitive to use over the next time step. Two test cases are presented which demonstrate a 36% and 48% reduction in error between the follower response trajectory and the follower optimal trajectory when compared to using a single Relational Maneuver Primitive.