Abstract
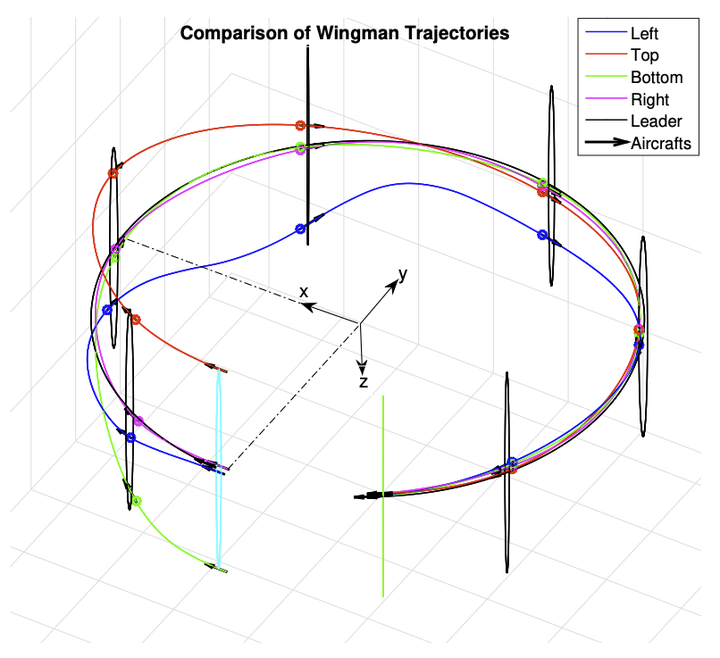
This paper focuses on optimizing the 3D flight trajectory of a fixed-wing follower aircraft in a leader-follower formation scenario. Instead of a rigid formation, the desired formation is defined as set of points configured as a ring located behind the leader. Both the leader and the wingman aircraft are modeled by high order dynamics. In particular, we formulate the optimization problem under three different system structures: (i) naturally constrained, (ii) ring angle constrained, and (iii) controller constrained. These system structures reflect the variation of possible inputs to the system under different levels of control freedom, from an unknown control structure to a known control structure. The optimization objective is to minimize the thrust profile so that the follower minimizes its consumed energy while also maintaining the desired wingman formation. Our simulation studies demonstrate that optimized solutions are attainable for all three cases. Moreover, for a naturally constrained system, there exists a convergent steady-state solution for the wingman’s position along the ring structure that represents a global solution, regardless of the wingman’s initial states.