Abstract
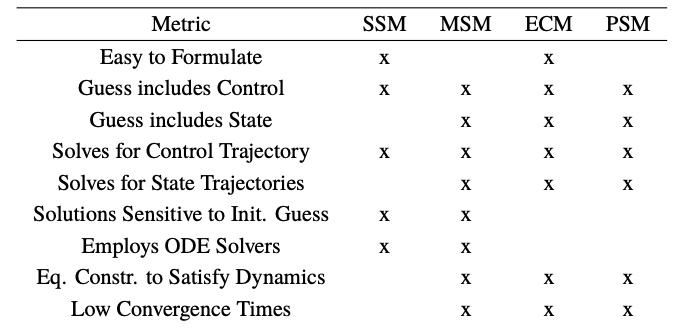
The goal of optimal control is to obtain an admissible function which minimizes an objective functional subject to specified constraints and boundary conditions. Four popular methods of computing the optimal control directly are the Single Shooting Method, Multiple Shootings Method, Even Collocation Method, and Pseudospectral Method. In this paper, the four direct methods of computing the optimal control for the Active Target Defense Scenario are presented and compared. The Active Target Defense Scenario is a three-agent engagement where an evading agent tries to escape a pursuing agent with the assistance of a defending agent. The goal of the Evader is to maneuver in such a way as to assist the Defender in capturing the Pursuer while maximizing his range from the Pursuer. This work begins by describing each direct method and summarizing advantages and disadvantages of each. Next, each method is used to solve the optimal control for the Active Target Defense Scenario; results are presented and a comparison of the performance of each method is made. Finally, concluding remarks describing the results, performance, and real-time implementation are presented.