Engagement Zone Defense of a Non-Maneuvering Evader
Abstract
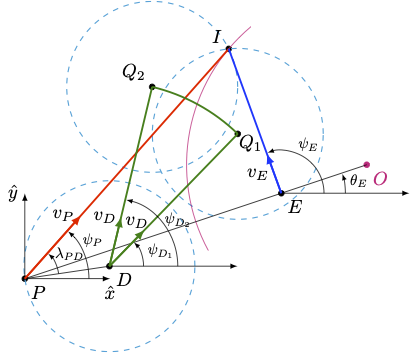
This paper considers a three agent scenario consisting of a pursuer, evader, and a defender. The pursuer’s objective is to capture the non-maneuvering evader in minimum time while a defender aims at maximize contact with the pursuer by keeping the pursuer inside his circular engagement zone for as long as possible; the pursuer is considered to be faster than both the evader and the defender. Using optimal control theory, the optimal control for the defender that maximizes contact with the pursuer is posed and solved. In the event that the evader is captured by the pursuer before the pursuer escapes the engagement zone of the defender, some suboptimal strategies of the defender provide equivalent contact time. A derivation of defender’s headings that maximize contact is presented along with examples that highlight the importance of the initial conditions of the engagement scenario.