Min-Time Escape of a Dubins Car from a Polygon
Abstract
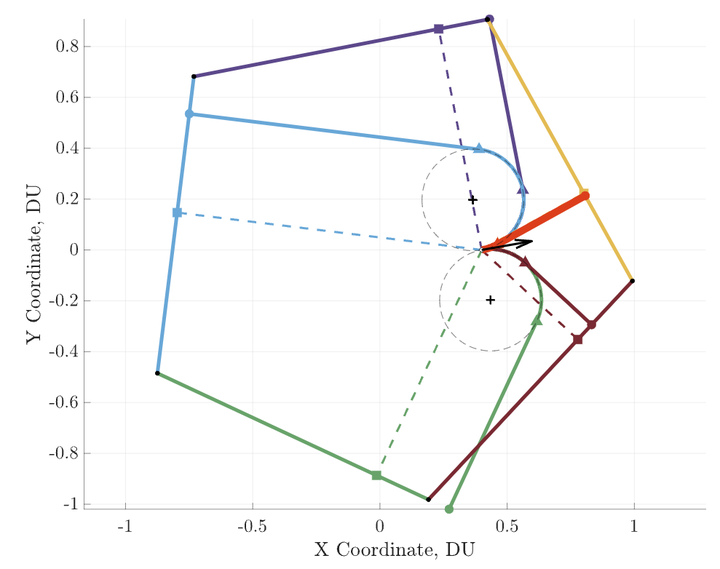
A turn constrained vehicle is initially located inside a polygon region and desires to escape in minimum time. First, the method of characteristics is used to describe the time-optimal strategies for reaching a line of infinite length. Next, the approach is extended to polygons constructed of a series of line segments. Using this construction technique, the min-time path to reach each edge is obtained; the resulting minimum of the set of optimal trajectories is then selected for escaping the polygon.
Type